
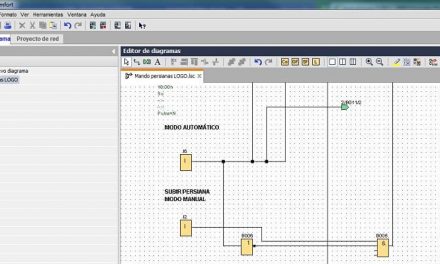
Ejemplo de marcha motor usando pulsadores con dos sentidos de giro, utilizando pulsadores y en un solo segmento y con realimentación de las salidas, en programación en S7-200. Usando pulsadores para cada sentido de giro y un pulsador de paro para parar las salidas.
Control marcha motor usando pulsadores solamente con dos sentidos de giro.
El objetivo es controlar dos salidas del autómata que permitirán controlar el sentido de giro de un motor, a derechas e izquierdas. El motor se pondrá en marcha mediante dos pulsadores, uno para cada sentido, utilizando para ello las realimentaciones de las salidas en un mismo segmento, sin necesidad de usar las instrucciones SET. Tendremos dos entradas para la parada del motor, una de protección térmica y la otra entrada mediante un pulsador de paro.
Componentes hardware utilizados.
I0.0 Botón Marcha del motor sentido a derechas.
I0.1 Botón Marcha del motor sentido a izquierdas.
I0.2 Relé térmico del motor; contacto cerrado; sobre temperatura.
I0.3 Botón de parada del motor. Se usa su Contacto cerrado.
Q0.0 Marcha del motor sentido a derechas.
Q0.1 Marcha del motor sentido a izquierdas.
El programa descargable está implementado en una CPU 224 con versión de Firmware V2.01. pero fácilmente se puede cambiar el modelo y la versión una vez abierto el proyecto, en el árbol del proyecto, y seleccionar la CPU que se necesite.

Puedes encontrar ejemplos de programación para descargar en la zona de "Descargas". Ejemplos en MicroWin, en Step 7, en LOGO y en TIA Portal, para CPU y HMI. Ejemplos de aplicaciones reales, configuraciones, simulaciones, etc...
Componentes software utilizados.
Entrada del PLC a modo de pulsos: cuando se detecte un flanco de esta entrada servirá para darle la señal a la marcha motor en cada sentido de giro.
Salidas del PLC que controlarán el giro a derechas o giro a izquierdas del motor.

Secuencia de programación de la marcha motor usando pulsadores en S7-200.
La programación seguirá la siguiente secuencia:
El motor podrá girar a derechas (Q0.0) o a izquierdas (Q0.1) mediante un pulsador a cada entrada del autómata que permitirá cada uno un sentido de giro. No se utilizará ninguna función SET para mantener la marcha, por tanto, se utiliza una realimentación de la salida para permitir la marcha cuando soltemos el pulsador de marcha.
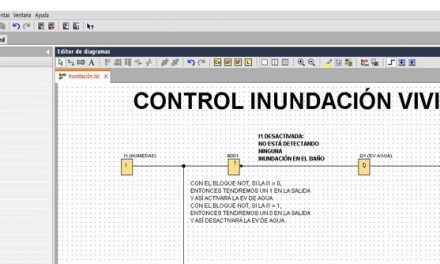
La parada del motor se realizará mediante dos entradas posibles: un pulsador de parada del motor y otra entrada que se establece como un relé térmico que permitirá la parada mediante una sobrecarga del motor por sobre temperatura. Este relé térmico utilizará el contacto cerrado, por tanto, cuando se dispare, se abrirá el contacto. El pulsador funciona con un contacto cerrado también.

Descarga el ejemplo directamente en el siguiente LINK de la zona de «DESCARGAS»:

Desarrollado y publicado por www.tecnoplc.com. Licencia Creative Commons 4.0.![]()


{kind=link}